Cảm biến quán tính VEX IQ:
Bộ não VEX IQ (thế hệ thứ 2) được tích hợp Cảm biến quán tính. Cảm biến quán tính báo cáo dữ liệu về tiêu đề, góc quay, hướng và gia tốc trong bảng điều khiển cảm biến và trong VEXcode IQ.
Sử dụng Màn hình Thiết bị - IQ Brain (thế hệ 2):
Sử dụng các nút trái và phải để tô sáng tùy chọn menu Thiết bị, sau đó nhấn nút Kiểm tra để chọn Thiết bị.
Trong menu Thiết bị, bạn sẽ thấy các thiết bị được kết nối trên robot của mình.
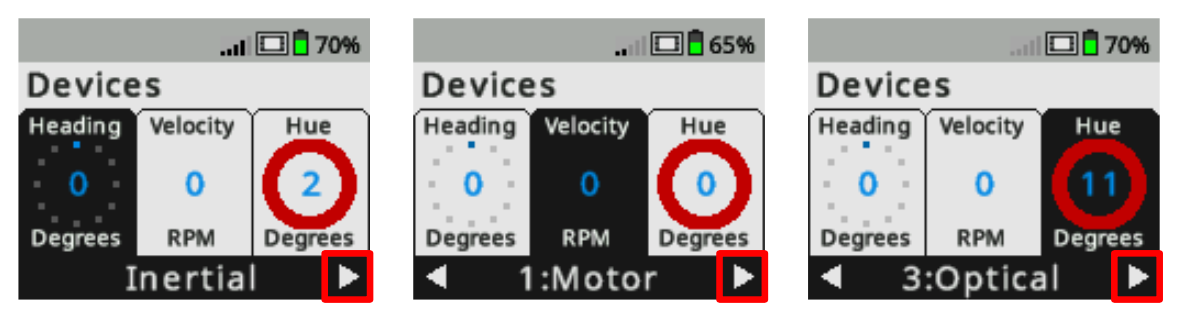
Sử dụng các nút trái và phải để làm nổi bật cảm biến mong muốn của bạn, sau đó nhấn nút Kiểm tra để chọn nó.
Nếu có nhiều loại dữ liệu được cảm biến báo cáo, bạn có thể sử dụng nút Kiểm tra để cuộn qua các tùy chọn dữ liệu cảm biến.
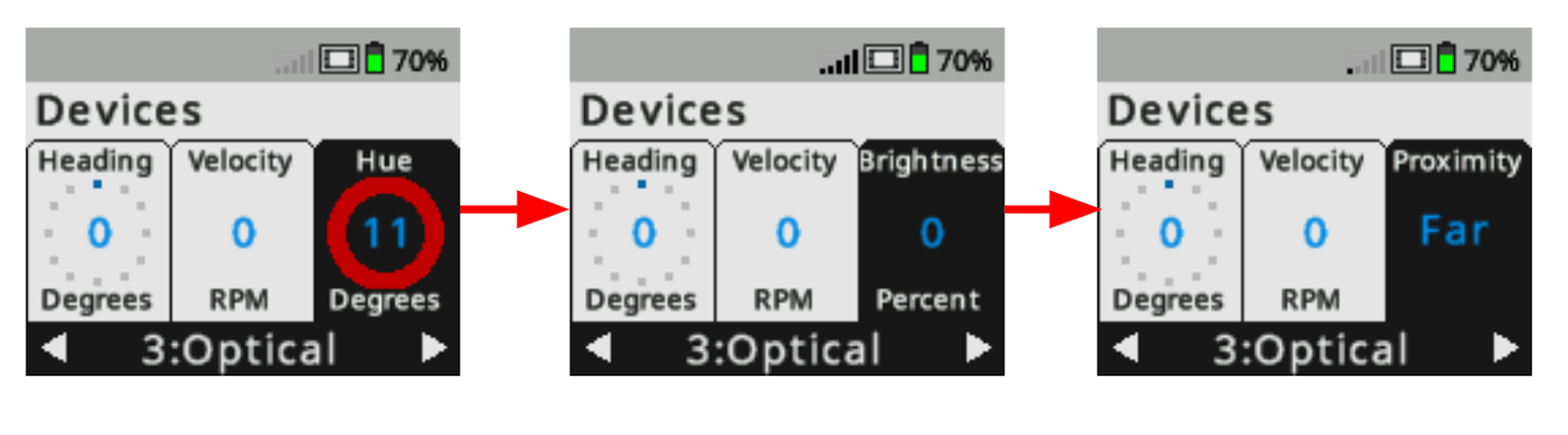
Trong hình ảnh ví dụ này, Cảm biến quang học có thể hiển thị giá trị màu sắc, độ sáng hoặc độ gần.

Tiếp tục nhấn nút Kiểm tra cho đến khi bạn thấy chế độ xem Bảng điều khiển mong muốn cho cảm biến đã chọn của mình.
Phần mở đầu:
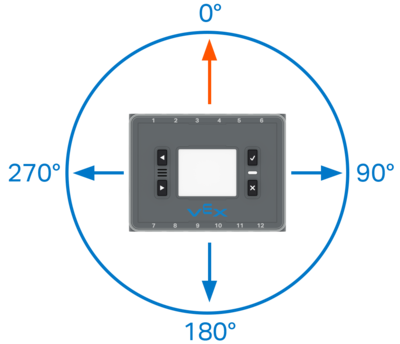
Tiêu đề là hướng mà Bộ não đang hướng tới và được báo cáo theo kiểu la bàn sử dụng độ từ 0-359,99. Điểm 0 có thể được đặt bằng cách sử dụng các lệnh trong VEXcode IQ hoặc bằng cách hiệu chỉnh Brain VEX IQ (thế hệ 2). Thông tin này cũng có thể được sử dụng để quay robot hướng về một vị trí cụ thể khi sử dụng Hệ thống truyền động.
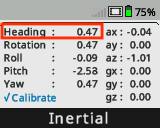
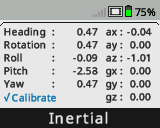
Trong bảng điều khiển cảm biến trên màn hình của Brain, tiêu đề là giá trị đầu tiên được liệt kê. Nếu di chuyển Brain khi đang ở trên màn hình này, sẽ thấy các giá trị được cập nhật theo thời gian thực.

Giá trị này được đặt thành 0 độ khi Brain được bật và Cảm biến quán tính hiệu chỉnh. Nếu muốn đặt lại tiêu đề của Brain, hãy chọn nút kiểm tra trên Brain. Thao tác này sẽ đặt lại tiêu đề và góc xoay về 0 độ, đồng thời tất cả dữ liệu trên bảng điều khiển cảm biến Cảm biến quán tính sẽ dựa trên vị trí bắt đầu mới này.
Góc xoay:
Chuyển động quay được báo cáo khi robot quay quanh trục trung tâm của Bộ não. Số độ được báo cáo trên bảng điều khiển cảm biến cho biết hướng rẽ và giá trị độ của các lượt rẽ mà Brain đã hoàn thành kể từ khi hiệu chỉnh. Không giống như tiêu đề, các giá trị số không bị giới hạn ở 0-359,99 độ. Robot có thể xoay ngược chiều kim đồng hồ để có giá trị âm hoặc theo chiều kim đồng hồ để có giá trị dương và sẽ tiếp tục tăng giá trị độ để phù hợp với số vòng quay mà Cảm biến quán tính trong Bộ não báo cáo.
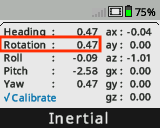
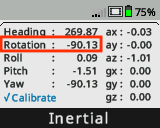
Trong bảng điều khiển cảm biến trên màn hình của Brain, góc quay là giá trị thứ hai được liệt kê. Nếu bạn xoay Brain khi đang ở trên màn hình này, bạn sẽ thấy các giá trị được cập nhật theo thời gian thực.

Giá trị này được đặt thành 0 độ khi Brain được bật và Cảm biến quán tính hiệu chỉnh. Nếu bạn muốn đặt lại vòng quay của robot, hãy chọn nút kiểm tra trên Brain. Thao tác này sẽ đặt lại tiêu đề và góc xoay về 0 độ, đồng thời tất cả dữ liệu trên bảng điều khiển cảm biến Cảm biến quán tính sẽ dựa trên vị trí bắt đầu mới này.
Pitch, Roll, and Yaw
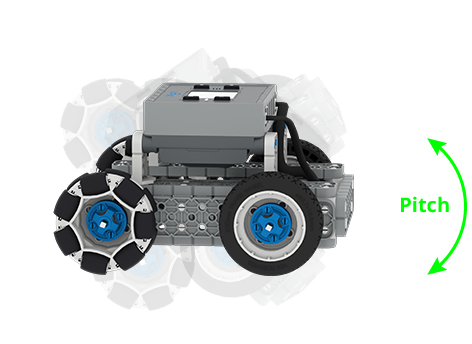
Pitch, Roll, and Yaw là góc định hướng của Não dọc theo một trục xác định. Cao độ biểu thị trục x và góc nghiêng của robot về phía trước và phía sau. Giá trị cho phạm vi cao độ từ -90 độ đến 90 độ.
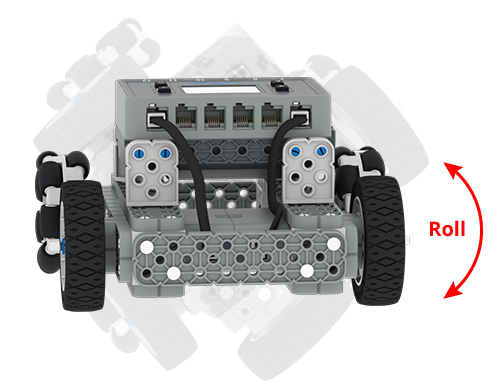
Roll đại diện cho trục y và góc nghiêng của robot sang trái và phải. Giá trị cuộn nằm trong khoảng từ -180 độ đến 180 độ.
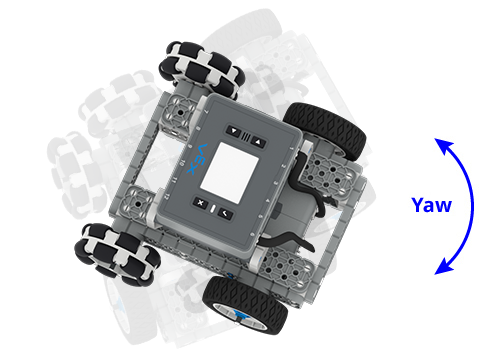
Yaw đại diện cho trục z và góc quay của robot. Giá trị cho phạm vi yaw từ -180 độ đến 180 độ.
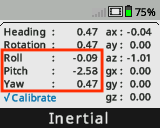
Pitch, Roll, and Yaw được hiển thị trên bảng điều khiển cảm biến bên dưới tiêu đề và xoay.
Gia tốc trên trục x, y và z
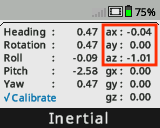
Gia tốc của phần trên bảng điều khiển cảm biến báo cáo giá trị gia tốc của Cảm biến quán tính dọc theo một trục được chỉ định. Gia tốc dọc theo trục x, y và z được hiển thị trên bảng điều khiển cảm biến ở bên phải bằng các chữ viết tắt "ax", "ay" và "az". Mỗi báo cáo này nằm trong khoảng từ -4,0 đến 4,0 Gs.
Khi Bộ não nằm trên một bề mặt, bạn sẽ thấy giá trị khoảng -1,0 Gs. điều này là do lực hấp dẫn tác dụng lên Não khi ở trạng thái nghỉ.
Tốc độ quay trên trục x, y và z
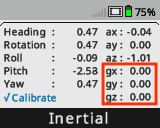
Tốc độ con quay của phần trên bảng điều khiển cảm biến báo cáo tốc độ giá trị quay của Cảm biến quán tính dọc theo một trục được chỉ định. Tốc độ quay dọc theo trục x, y và z được hiển thị trên bảng điều khiển cảm biến ở bên phải bằng các chữ viết tắt "gx", "gy" và "gz". Mỗi báo cáo này có phạm vi từ -1000,0 đến 1000,0 độ mỗi giây.
